■ Feature Line Extraction
|
■Feature Line Extraction from Unorganized Noisy Point Clouds Using Truncated Fourier Series E. ALTANTSETSEG,Y. MURAKI, K. MATSUYAMA, K. KONNO
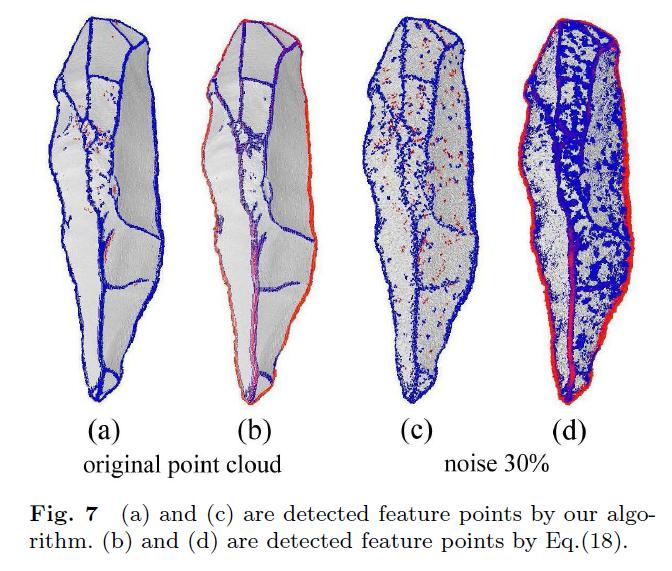
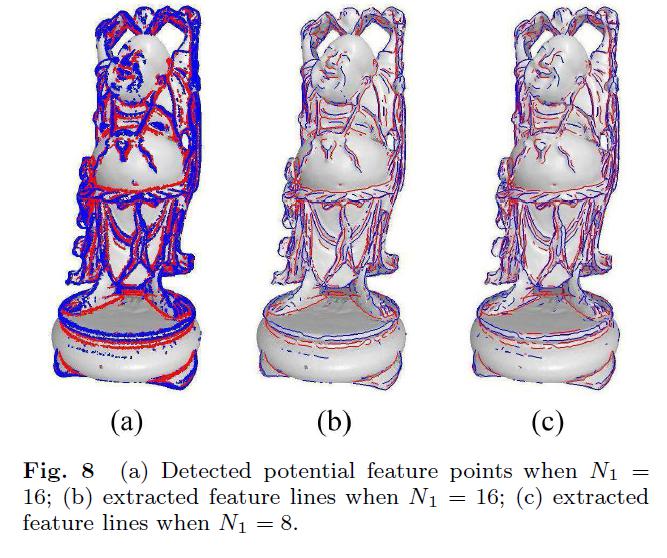
ABSTRACT The detection of feature lines is important for representing and understanding geometric features of 3D models. In this paper, we introduce a new and robust method for extracting feature lines from unorganized point clouds.We use a one-dimensional truncated Fourier series for detecting feature points. Each point and its neighbors are approximated along the principal directions by using the truncated Fourier series, and the curvature of the point is computed from the approximated curves. Fourier coefficients are computed by Fast Fourier Transform (FFT). We apply low-pass filtering to remove noise and to compute the curvature of the point robustly. For extracting feature points from the detected potential feature points, the potential feature points are thinned using a curvature weighted Laplacian-like smoothing method. The feature lines are constructed through growing extracted points, and then projected onto the original point cloud. The efficiency and robustness of our approach is illustrated by several experimental results. |
|
|
|
|
|
|
|
|
|
|
|
|
■Slide
![]()